참고자료 : 3D Computer Vision | Lecture 2 (Part 1) : Rigid Body motion and 3D Projective Geometry
학습목표
- SE(3) group 개념, 3D space 에 있는 rigid body motion을 표현하는 데 사용가능
- Perspective 3D view에서 point와 plane을 정의하고, point-plane duality를 설명가능
- Perspective 3D view의 line들을 표현하기 위해 null space, span matrix, plucker coordinate를 사용할 수 있음
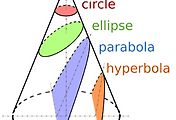
- Perspective 2D view conics을 사용하여 Perspective 3D view quadric을 설명하는 데 사용할 수 있음
Notation
- Euclidean space : E^3
- 모든 Euclidean space 내 point는 Cartesian coordinates 내 실수로 표현가능하다.
- Vector의 정의
- Bound vector
- Free vector
- Inner product
- 같은 벡터간의 내적 : distance
- 다른 벡터간의 내적 : 두 벡터 간 각도
- If inner product == 0 : orthogonal vectors
- Outer product (Cross product)
- Right Hand Rule
- 외적벡터 : 두 벡터에 모두 orthogonal 한 벡터
- ( u x v) = - (u x (-v)) = ((-v) x u)
- Skew Symmetric Matrix : U * v = B 형태로 나타낼 수 있다.
- Object Coordinate Frame (Body Coordinate Frame)
- Rigid Object는 항상 3D 상의 orthonomal 좌표계에서 정의될 수 있다.
- (예) : Camera Frame, World Reference Frame
- Translation Vector
- Rotation Matrix ( : Relative Orientation)
- Rigid Body Motion
- Transformation 과정을 거치더라도 두 점의 distance는 보존된다.
- Euclidean Transformation
- 정의 : A map that preserves the distance
- 3-D Space에서의 Notation : E(3)
- Special Euclidean Transformation
- Mapping 관계 g를 정의
- Preserve Norm : || g(v) || = || v ||
- Preserve Cross product : g(u) x g(v) = g( u x v)
- Preserve angle : <u,v> = < g(u), g(v) >
- Preserve Volume : <u, v x w > = < g(u), g(v) x g(w) >
- Volume 구하는 식 : <u, v x w>
- Orthogonal Matrix Representation of Rotation
- 각각의 항들이 orthonormal하므로, R^T * R = I 를 만족
- det(R) = 1
- Special Orthogonal Matrix
- Right hand Rule을 보존하는 (= Orientation Preserving)
- Preserve Distance?
- Preserve angle (Preserve Inner Product)
- Preserve Cross Product
- Euler Angle to Rotation Matrix
- Tait-Bryan Angles ( Yaw - Pitch - Roll 순서)
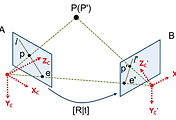
- Rigid-body motion and its representations
- X_w = R_wc * X_c + T_wc
- 이 때 linear mapping function : Homogeneous Representation g 를 정의할 수 있다.
- Composition Rule 성립
'Computer Vision > Multiple View Geometry' 카테고리의 다른 글
| [Multiple View Geometry] 이미지에서 아핀변환과 거리 속성의 복원 (0) | 2022.10.02 |
|---|---|
| Epipolar Geometry (0) | 2022.08.28 |
| [Multiple View Geometry] Conics, Quadrics (0) | 2022.08.28 |
| [Multiple View Geometry] Chapter 2 (Part 1/2) (0) | 2022.07.17 |
| [Multiple View Geometry] Chapter 2,3 (Part 2/2) (0) | 2022.07.10 |
댓글